Radarsensorer i førerassistentsystemer
Vognbaneskift-assistent
Her får du nyttig viden og vigtige tips om vognbaneskift-assistent hhv. blindvinkel-assistent.


I takt med videreudviklingen af førerassistentsystemer til forebyggelse af ulykker vokser interessen for radarsensorer til assistentsystemer for området bag bilen. Flere og flere bilmodeller vil blive standardmonteret med sådanne sensorer. Derfor bliver diagnose og reparation før eller senere en del af dagligdagen på værkstedet, ikke blot for mærkeværkstederne, men også for de frie værksteder. I denne artikel beskæftiger vi os specielt med radarsensorer til brug bag på bilerne og brugen af dem i førerassistentsystemet "vognbaneskift-assistent".
Vigtig sikkerhedsanvisning
De følgende tekniske informationer og praktiske tips er udarbejdet af HELLA for at hjælpe bilværkstederne professionelt med deres arbejde. De informationer, der gives på denne hjemmeside, må kun benyttes af brancheuddannede fagfolk.
INDHOLDSFORTEGNELSE
RADARSENSORER I FØRERASSISTENTSYSTEMER: VÆRD AT VIDE
Flere og flere assistentsystemer til hjælp for føreren udstyres med radarsensorer. En fordel ved denne teknik er, at radarsensorer kan give præcise måleresultater, uafhængigt af vejrforholdene. Begrebet „radar“ forbindes først og fremmest med luftfart og skibsfart. Radarsystemer har været etablerede og gennemprøvede på disse områder i mange år. „Radar“ er en forkortelse for Radio Detection and Ranging, som frit oversat betyder „Registrering og afstandsmåling via radio“.
Forenklet forklaret udsender en radarenhed en smal stråle af elektromagnetiske bølger med lysets hastighed, såkaldte primærsignaler. Hvis disse bølger rammer en genstand, reflekteres de og modtages som et ekko (sekundærsignaler) af systemet, som bearbejder dem. Systemets elektronik til bearbejdning kan dermed bestemme retning, afstand og hastighed.
Anvendelse i automobilsegmentet
Radarsensorer benyttes til afstandsmåling i førerassistentsystemer foran og bag på bilerne i flere forskellige assistentsystemer.
Radarsensorer til brug foran, som f.eks. adaptiv fartpilot ACC (Adaptive Cruise Control), har allerede kunnet fås i en række biler i flere år.
I takt med videreudviklingen af førerassistentsystemer til forebyggelse af ulykker vokser interessen for radarsensorer til assistentsystemer for området bag bilen. Flere og flere bilmodeller vil blive standardmonteret med sådanne sensorer. Derfor bliver diagnose og reparation før eller senere en del af dagligdagen på værkstedet, ikke blot for mærkeværkstederne, men også for de frie værksteder.

Assistentsystemer hjælper føreren. Der benyttes en række teknologier.
Assistentsystemer hjælper føreren. Der benyttes en række teknologier.
HELLA 24 GHZ RADARSENSORER: GRUNDPRINCIPPER
HELLA har i mere end et årti produceret radarsensorer i området 24 GHz-smalbånd. HELLA havde allerede i 2005 udviklet den første generation af 24 GHz-radarsensorer til fabriksmontering. Sensorerne er velegnede til systemer, som i mellemtiden er blevet etableret som standard, så som blindvinkel-registrering, vognbaneskift-assistent samt hjælp til baglæns udkørsel fra P-plads.
Radarsensoren registrerer og bearbejder informationer om hastighed, vinkel og afstand til genstande i et område på op til 70 meter bag ved køretøjet. Helt fra første generation af enhederne har man benyttet modulationsproceduren LFMSK (Linear Frequency Modulation Shift Keying).
Ved hjælp af denne procedure kan man registrere og bestemme afstanden og den relative hastighed i forhold til flere objekter med kun et enkelt signal (chirp), hvis frekvens ændres med tiden.
I tredje radar-generation benyttes en videreudviklet FM-variant, hvor modulationsbåndbredden er begrænset til maks. 200 MHz. Dette system arbejder med en gennemsnitlig sendeeffekt på 13 dBm (EIRP) i et frekvensbånd mellem 24,05 og 24,25 GHz. Den herved opnåede opløsning i stedbestemmelsen på 0,75 m er velegnet til de bagendefunktioner, der er udviklet. Vinkelbestemmelsen sker ved hjælp af den såkaldte monopuls-proces. Dette system foretager en fasesammenligning af radar-refleksionerne via de enkelte modtagelsesgrene på basis af specifikke procedurer for bearbejdning af signalerne.
I fjerde generation af radarsensorer er der integreret en ekstra sikkerhedsfunktion, nemlig udstigningsassistenten. Den kan i god tid registrere farlige situationer som forbikørende køretøjer og advare personerne i bilen, inden de stiger ud.

| TEKNISKE DATA | |
|---|---|
| Måleprincip | LFMSK (Linear Frequency Modulation Shift Keying) |
| Frekvensområde | 24,15 GHz/ISM |
| Båndbredde | <= 200 MHz/ISM |
| Overførselseffekt | <= +20 dBm maks. effekt, EIRP |
| Takttid | 1,5 m ved 200 MHz OBW |
| Hastighedsmåling Relativt hastighedsinterval |
-70 m/s til +70 m/s |
| Registreringsområde – azimut | 165° |
Afhængigt af sensorgeneration kan der integreres følgende anvendelser:



VOGNBANESKIFT-ASSISTENT: OPBYGNING OG FUNKTION
En teknisk nyskabelse inden for førerassistentsystemer er vognbaneskift-assistenten. Den informerer føreren om evt. risici ved vognbaneskift på flersporede veje og motorveje, og den bidrager dermed til at forebygge ulykker og højner således også trafiksikkerheden.
I dette afsnit illustreres de følgende systeminformationer med førerassistentsystemet Audi Side Assistsom eksempel.

1

Styreenheder

Vognbaneskift-assistenten består af en master- og en slave-styreenhed, der er opbygget ens. Sammen med en integreret radarsensor udgør hver af de to styreenheder en selvstændig komponent. Styreenheden har et plastdæksel over radarsensoren. Dette dæksel, der betegnes som „radom“, består af et specielt materiale, som radarbølgerne kan gå igennem på optimal måde.
.„Master“-styreenheden (1) er monteret bag kofangeren i venstre side, og „Slave“-styreenheden (2) er monteret bag kofangeren i højre side.
.
2
Advarselslamper

Systemet har desuden to advarselslamper med hver 4 LED'er, der er integreret i sidespejlene i højre og venstre side.
3
Tænd-/sluk-knap

Der sidder en knap til at tænde og slukke for funktionen vognbaneskift-assistent i afdækningen over forreste venstre dørbeklædning.
Funktionsstatus angives med en integreret LED i knappen. Systemet lagrer den senest valgte tilstand og bibeholder den ved næste start.
Funktionsbeskrivelse af vognbaneskift-assistenten
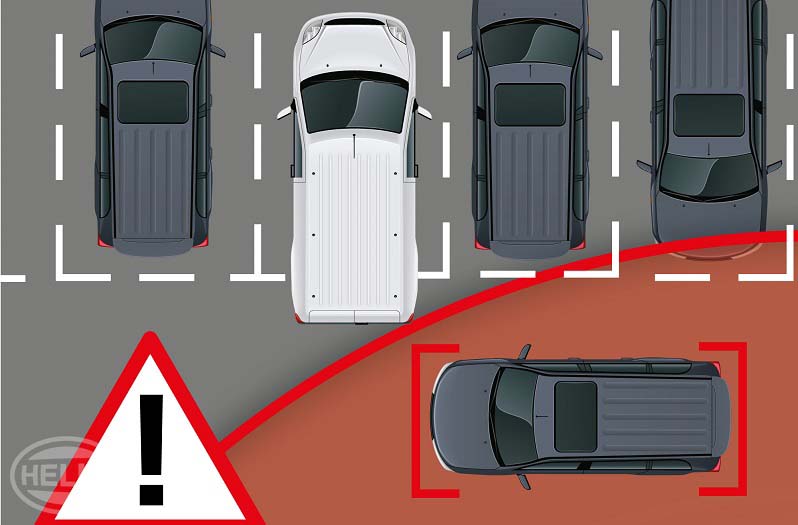
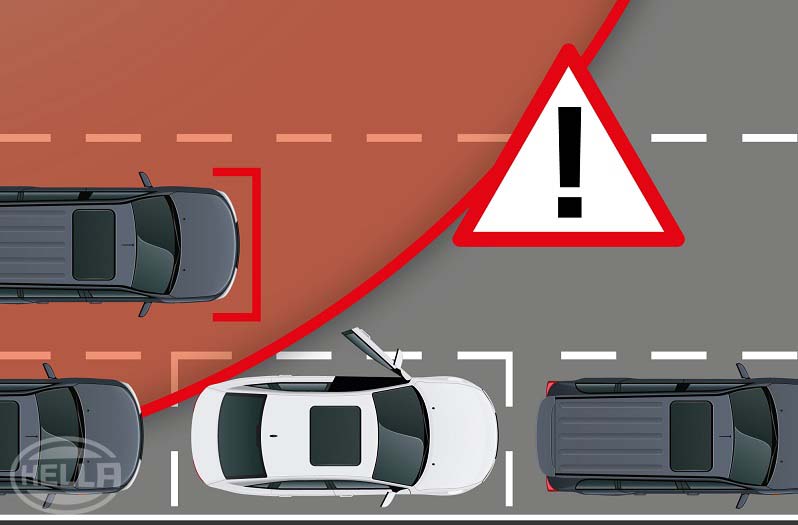
Vognbaneskift-assistenten „Side Assist“ er i funktion ved hastigheder over 30 km/h. Radarsensorernes registreringsområde (A) er ca. 50 meter bag og ca. 3,60 meter (B) til siden for bilen.
Systemet overvåger trafikken bag ved og til siden for bilen ved hjælp af radarsensorerne. Det overvågede område omfatter den „blinde vinkel“, som føreren ikke kan se, i både venstre og højre side.
Hvis der befinder sig et køretøj i det overvågede område, og der ikke foretages vognbaneskift, informeres føreren ved, at LED-advarselslamperne i højre hhv. venstre sidespejl lyser svagt. Lysstyrken er lav for ikke at distrahere føreren unødigt. Hvis føreren aktiverer blinklyset for at skifte bane, advares føreren ved, at advarselslamperne i sidespejlet i den pågældende side blinker kraftigt.
Hvis systemet registrerer et køretøj, beregner den pågældende styreenhed samtidig tiden til en evt. kollision. På basis af denne beregning skelner systemet mellem køretøjer, som nærmer sig, som kører med samme hastighed, og som kører langsommere.

Radarsensorernes registreringsområde (A) er ca. 50 meter bag og ca. 3,60 meter (B) til siden for bilen.
Radarsensorernes registreringsområde (A) er ca. 50 meter bag og ca. 3,60 meter (B) til siden for bilen.

KOMMUNIKATION OG SYSTEMINTEGRATION: OVERSIGT
Vognbaneskift-assistenten har brug for en lang række informationer for at kunne beregne førerinformationerne om en evt. risikosituation. Styreenheden modtager de nødvendige informationer fra forskellige kilder.
Master- og slave-styreenhederne er forbundet med hinanden via en speciel High-Speed-CAN-databus. Datatransmissionen sker med en overførselshastighed på 500 kBit/s. Master-styreenheden kommunikerer med de øvrige systemer i bilen via diagnose-interfacet, hvorved den kan udveksle data med andre bus-tilsluttede enheder.

Kommunikation og systemintegration for vognbaneskift-assistent
Kommunikation og systemintegration for vognbaneskift-assistent
| Enhed | Information |
|---|---|
| Styreenhed for instrumentpanel | Visuel og akustisk førerinformation om forekommende fejl |
| Regn-lys-sensor | Informerer master-styreenheden om den aktuelle lysstyrke i omgivelserne for at tilpasse advarselslamperne |
| ABS-styreenhed | Information om hjulenes hastighed og gierraten |
| Styreenhed for anhængerregistrering | Information om kørsel med anhænger |
| Knap til vognbaneassistent | Information om vognbaneassistent, til eller fra |
| Centralstyreenhed komfort |
|
| Styreenhed for startberettigelse | Information om adgang-startberettigelse og nøgleinformation |
| Styreenhed for instrumenter og betjeningsenhed | Førerens ønske om „Lysstyrke for advarselslamper“ |
Førerinformationer i instrumentgruppe
Hvis systemet slås fra, vises følgende i displayet i instrumentgruppen:
| Indikeringer i display | Årsag |
|---|---|
| Audi Side Assist ikke til disposition: sensorer blokeret | Sensorernes arbejdsområde hhv. udsyn er blokeret af en cykelholder eller lignende. |
| Audi Side Assist: systemfejl | På grund af en defekt sensor kan systemet ikke garantere sikker funktion og slås fra. |
| Audi Side Assist: ikke til disposition i øjeblikket | Midlertidig frakobling som følge af defekt batteri elle for lav ladetilstand. |
| Audi Side Assist: ikke til disposition ved kørsel med anhænger | Kørsel med anhænger er registreret. |
Funktionsbegrænsninger
Radarsystemet er afstemt således, at det dækker alle kørselsforhold med vognbaner af normal bredde til højre og til venstre for bilen. Alligevel kan systemet i enkelte tilfælde tænde advarselslampen i sidespejlet, selv om der ikke befinder sig et andet køretøj i det kritiske område for vognbaneskift.
Bilfabrikanten nævner disse eksempler på sådanne situationer:
- Hvis føreren kører meget tæt på vejkanten på en smal vej, og systemet registrerer køretøjer i en anden vognbane.
- Ved kørsel i skarpe sving kan systemet evt. reagere på et køretøj i vognbanen ved siden af den tilstødende
- Reaktion på andre, for høje eller forskudte autoværn eller andre objekter
- Funktionsbegrænsninger som følge af meget dårlige vejrforhold
INFORMATION
For at vognbaneskift-assistenten skal kunne fungere korrekt, må kofangeren ikke tildækkes eller påklæbes noget i området ved radarsensorerne. Desuden skal disse områder holdes fri for is og sne om vinteren.
DIAGNOSE- OG REPARATIONSVEJLEDNING FOR VOGNBANESKIFT-ASSISTENT: VIDEO
Servicearbejde på radarsensor - Audi Side Assist
I denne video viser vi dig diagnose- og reparationsvejledninger for førerassistentsystemet "vognbaneskift-assistent“.
03:41 min
SERVICEARBEJDE PÅ VOGNBANESKIFT-ASSISTENT: DIAGNOSE
Diagnose
Vognbaneskift-assistentens systemfunktioner overvåges konstant. Eventuelle fejl lagres i styreenhedens fejlhukommelse, hvor de kan udlæses med et passende diagnoseapparat. Desuden kan der alt efter system vises en række parametre, som kan benyttes ved fejlfinding.
Ved fejlfinding kan følgende diagnosefunktioner benyttes:
1

Fejlkode

I denne funktion kan fejlhukommelsen udlæses og fejlkoderne slettes. Desuden kan informationer om fejlkoden udlæses.
2
Udlæsning af parametre
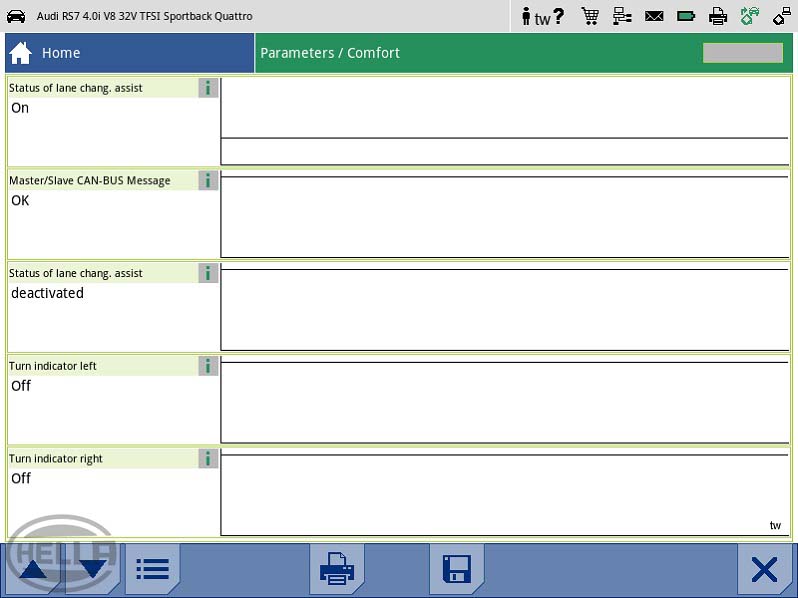
I denne funktion kan de aktuelle måleværdier i styreenheden vises.
3
Aktuatortest
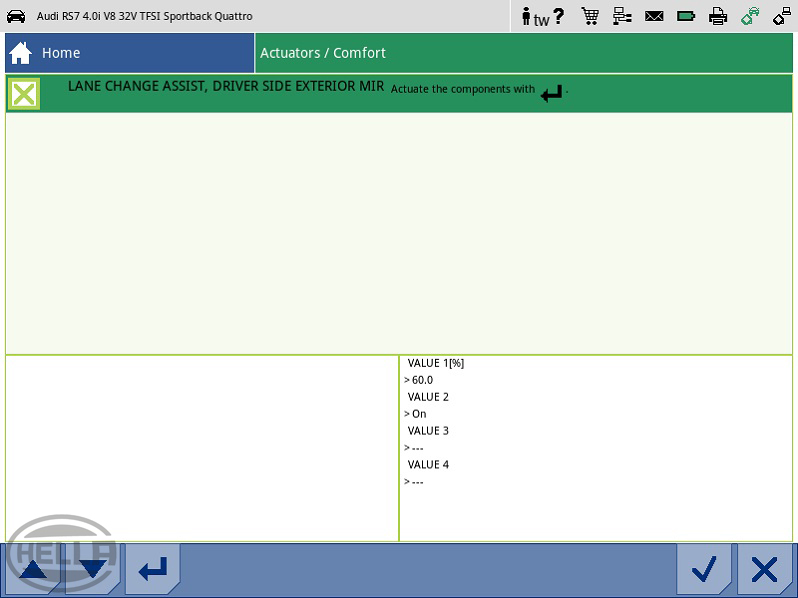
- Aktivering af komponenter via styreenheden i elektroniske systemer
- Kontrol af komponenternes grundfunktion og ledningsforbindelser
4
Kodning
- I denne funktion kan nye komponenter eller ekstra funktioner i systemet aktiveres hhv. kodes.
- Kodning af aktuatorer og styreenheder efter udskiftning i bilen
5
Identifikation af styreenheder

Her kan specielle system- og styreenhedsinformationer fremkaldes.
INFORMATION
De forskellige diagnosemuligheder er vist med diagnoseapparatet mega macs 66 som eksempel. De aktuelle testmuligheder og funktionsantal afhænger af systemkonfigurationen for styreenheden.
Kalibrering
For at garantere korrekt funktion af vognbaneskift-assistenten skal den tilpasses efter følgende arbejder:
- Når en eller begge styreenheder er udskiftet
- Når der er foretaget reparationer af den bageste del af karrosseriet
- Når positionen af bagkofangeren er ændret
- Når styreenhedernes placering er ændret ved af- og påmontering
Til kalibrering af systemet kræves der foruden et diagnoseapparat også en dopplergenerator og en kalibreringstavle. Kontrolværktøjerne placeres bag bilen som foreskrevet af bilfabrikanten. Dopplergeneratoren simulerer et objekt, der bevæger sig. Kalibreringen startes via diagnoseapparatet og føres gennem de foreskrevne trin i arbejdet. I dette fuldautomatiske forløb registrerer styreenheden de nødvendige korrektionsværdier på basis af den aktuelle og den ønskede position og lagrer dem med henblik på fremtidige afstandsmålinger.
