Manuel lyslængderegulering
Lyslængderegulering
Her får du nyttige tips om lyslængderegulering af billygter.


Bilens belastning og dens nikbevægelser ændrer forlygternes lyslængde. Derved kan andre trafikanter blive blændet. Derfor er systemer til lyslængderegulering (LWR) påbudt ved lov. På denne side kan du se, hvordan de mest udbredte systemer på markedet fungerer, og hvordan man kan kontrollere dem med enkle midler. Desuden kan du få at vide, hvad der skal gøres i tilfælde af fejl, og hvad der skal påses ved indstilling af forlygter med automatisk lyslængderegulering.
Vigtig sikkerhedsanvisning
De følgende tekniske informationer og praktiske tips er udarbejdet af HELLA for at hjælpe bilværkstederne professionelt med deres arbejde. De informationer, der gives på denne hjemmeside, må kun benyttes af brancheuddannede fagfolk.
INDHOLDSFORTEGNELSE
MANUEL LYSLÆNGDEREGULERING: FUNKTION
Lyslængdereguleringen har til opgave at tilpasse højden af lys-mørke-grænsen fra forlygterne til bilens belastning. Dermed skal det undgås, at modgående trafikanter blændes, når bilen er belastet. I dagens bilmodeller er der monteret manuelle og automatiske systemer til lyslængderegulering. I et manuelt system skal føreren selv indstille forlygtens lyskegle med en kontakt. Der findes både pneumatiske og elektriske systemer.
Problemet med dette er, at mange biler blænder, når de kører med læs, da føreren ikke har nok viden om indstillingsmulighederne og deres funktion i den pågældende bil.

AUTOMATISK LYSLÆNGDEREGULERING: FUNKTION
Opbygning af en automatisk LWR
Disse LWR-systemer løser opgaven uden førerens indgriben. Der skelnes mellem to systemer: kvasistatiske og dynamiske LWR.

1 Forlygte, 2 Aktuator, 3 Forakselsensor, 4 Lyskontakt, 5 Styreenhed, 6 Bagakselsensor, 7 Omdrejningssensor, 8 Belastning
Kvasistatisk LWR
Blandt de automatiske systemer til lyslængderegulering skelner man mellem kvasistatiske og dynamiske LWR-systemer. De kvasistatiske LWR-systemer korrigerer kun ændringer af bilens hældning som følge af ændringer af belastningen.
En styreenhed bearbejder signalerne fra for- og bagakselsensor, sammenligner dem med lagrede, ønskede data og aktiverer efter behov aktuatormotorerne i forlygterne.
Som regel monteres de samme aktuatormotorer som i et manuelt LWR-system. I kompakte biler uden lange overhæng giver dette system mulighed for, at man kan undvære forakselsensoren, da vinkelændringerne hovedsageligt kun forekommer på bagakslen. Den kvasistatiske LWR arbejder desuden med stor dæmpning, dvs. at den kun kompenserer for længerevarende ændringer i karrosseriets hældning. I HELLAs xenon-ombygningssæt benyttes et system på ultralydbasis. Her måler sensoren direkte afstanden til vejbanen.
Dynamisk LWR
I biler med xenon-forlygter monteres der i dag næsten udelukkende dynamiske LWR-systemer, som også reagerer på kørselsbetingede ændringer i hældningen som f.eks. acceleration og bremsning.
Diagrammet viser opbygningen af en dynamisk LWR. Her beregner styreenheden de ønskede data på basis af sensordataene under hensyn til kørselsbetingelserne. I modsætning til den kvasistatiske LWR aktiveres aktuatormotorerne i brøkdele af af et sekund. For at muliggøre disse hurtige reaktioner benyttes der hovedsageligt stepmotorer som aktuatorer i forlygterne.
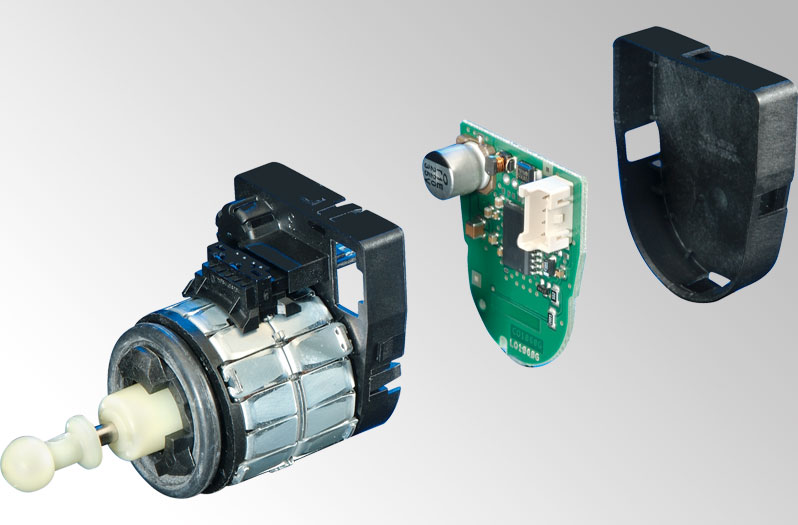
Aktuatormotor til manuel og automatisk LWR
I de systemer, der findes på markedet i øjeblikket, benyttes overvejende elektriske aktuatormotorer, og der monteres nu 3. generation med yderligere optimeringer (version 3i).
HELLA tilbyder optimale, kundespecifikke systemløsninger. Der leveres lygteaktuatorer til integration i lygterne samt lygteaktuatorer til separat montering, med eller uden manuel grundindstilling i både 12 V- og 24 V-udgaver. En fuldautomatisk produktionsproces med høje kvalitetsstandarder sikrer en produktion på mere end 10 mio. aktuatorer om året. I kraft af den konsekvente udbygning med internationale filialer er det muligt også at levere aktuatorer til kunder i Korea, Indien og Kina.

ISM (Intelligent Stepper Motor)
Den intelligente stepmotor udgør en mekatronikenhed, der indeholder både den bipolære stepmotor og effektelektronikken, som normalt er placeret i en separat styreenhed. Hovedelementet i en ISM er et integreret kredsløb, som varetager hele styringen af stepmotoren, diagnosen og interfacet til det overordnede system via et kommunikationsmodul med integreret LIN-Bus-interface.
De væsentlige fordele ved den intelligente stepmotor er
- Mikrotrinstyring (støj- og resonanssvag drift)
- Diagnosemulighed
- Forbedrede EMC-egenskaber
- Delvist uafhængig fejlbehandling
- Optimeret ledningskoncept
HELLA benytter især ISM-teknologien i de variable lygtesystemer. Ud over den intelligente stepmotor til dynamisk lyslængderegulering bliver dynamisk kurvelys og cylinderen i VARIOX®-modulet også udstyret med intelligente stepmotorer.
Styreenhed til automatisk og dynamisk LWR
Siden 1995 er der benyttet HELLA-styreenheder til automatisk og dynamisk lyslængderegulering i biler med xenon-lygter.
Den nye generation af styreenheder til lyslængderegulering udmærker sig ved en ekstra LIN-bus-udgang, hvorved den er udviklet til en universel standardkomponent. Dataene om fjedrenes sammentrykning fra akselsensorerne behandles i styreenheden, hvor de omregnes til styresignaler til indstilling af lyslængden ved hjælp af avancerede algoritmer. Modulopbygningen af styreenhederne gør det muligt at kombinere de enkelte komponenter som f.eks. hus, stik, printplade og software i henhold til de forskellige kundekrav, således at der opnås et maksimum af omkostningssynergi og fleksibilitet. I kraft af CAN-bus-interfacet kan styreenheden tilpasses til forskellige modeller ved kodning eller programmering af specifikke parametre ved enden af produktionslinjen.

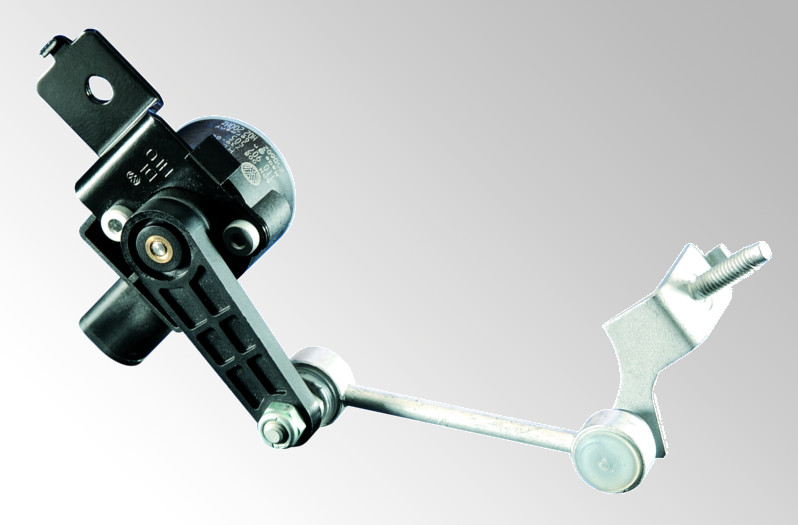
Induktiv niveausensor
I forbindelse med en række af sikkerheds- og komfortfremmende udstyr så som aktiv undervogn, niveauregulering samt automatisk lyslængderegulering er det nødvendigt at registrere bilens øjeblikkelige hældningsvinkel.
I den induktive niveausensor er der på en printplade monteret flere spoler, som der løber strøm igennem, og som dermed frembringer et magnetfelt. Over denne printplade sidder en rotor af metal, der bevæges af sensorens arm, og som påvirker magnetfeltet. Andre spoler, der er monteret på printpladen, registrerer ændringerne i magnetfeltet afhængigt af sensorarmens stilling, og ændringerne behandles af en specielt udviklet ASIS.
Denne sensor kan registrere forskellige vinkelområder med en konstant høj linearitet. Den induktive akselsensor afgiver både et analogt signal og et PWM-signal. Sensoren har en fremragende nøjagtighed og er helt uafhængig af temperaturen. Samtidig kan sensorens nulposition varieres individuelt. En videreudvikling af denne sensor er den nye induktive sensor, som langs omkredsen afgiver et gentaget PWM-signal, der er komprimeret til 75 %. Dermed kan denne sensor benyttes som standardkomponent uafhængigt af bilens platform. Forskellige monteringspositioner og monteringstolerancer udlignes med en elektronisk justering i den tilhørende styreenhed.
Næste trin i udviklingen er en fortsat optimering af størrelsen og en forbedring af udgangssignalet for flere typer hjulophæng (niveausensor af 2. generation).
Sensorintegreret styreenhed til lyslængderegulering
Til automatisk lyslængderegulering i kompakte køretøjer bliver den separate styreenhed integreret i akselsensoren i et følgende udviklingstrin: Sensor Integrated Electronic Control Unit (SIECU).
Basis for den sensorintegrerede lyslængderegulering er den induktive niveausensor. De mekaniske interfaces som montering og sensorarm svarer til akselsensorernes.
Princippet med automatisk lyslængderegulering via en sensorintegreret styreenhed ved bagakslen er ikke blot velegnet til biler med xenon-forlygter, men giver også betydelige komfort- og sikkerhedsfordele som erstatning for manuel indstilling i biler med halogen-forlygter.

TIPS TIL HÅNDTERING AF LWR-SYSTEMER: PRAKTISKE TIPS
Hvis der under kørslen opstår en elektrisk fejl i LWR-systemet, bliver forlygterne stående i samme position. I andre modeller føres forlygterne imidlertid tilbage til udgangsstilingen og forbliver der. I alle tilfælde gøres føreren opmærksom på fejlen via en kontrollampe eller en tekst på instrumentgruppens display.
LYSLÆNGDEREGULERING DEFEKT: FEJLÅRSAG
LYSLÆNGDEREGULERING, KONTROL: FEJLFINDING
Når bilen har automatisk LWR, kræves der i reglen et diagnoseapparat til indstilling af forlygterne. Det kan også benyttes til diagnose af LWR-systemet.
LWR-systemet kan dog også kontrolleres uden diagnoseapparat ved hjælp af multimeter og oscilloskop. Det er dog altid nødvendigt, at der foreligger et diagram over det system, der skal kontrolleres.

Kontrol af funktionsevnen
- Placer bilen uden læs på en plan overflade.
- Ret lygteindstillingsapparatet ind foran bilen, og tænd nærlyset. Kontroller lys-/mørke-grænsen.
- Belast bilens bagende, f.eks. ved at lægge noget i bagagerummet. I et kvasistatisk LWR-system sker reguleringen af forlygterne efter nogle sekunder, hvilket kan følges på lygteindstillingsapparatet. I et dynamisk LWR-system sker reguleringen meget hurtigt, så reguleringsproceduren for nogle biler kun ses på lygteindstillingsapparatets skærm som en kort "sitren". I nogle biler fungerer denne regulering dog først under kørslen.
Hvis der ikke kan registreres en reguleringsproces, skal følgende målinger foretages
- Forsyningsspændingen til aktuatormotorerne, styreenheden og LWR-sensoren kontrolleres.
- LWR-sensoren og dataledningerne kontrolleres for mekaniske skader og korrekt monteringsposition.
- Sensorsignalet kontrolleres med oscilloskop.
- Parametre og aktuelle værdier kontrolleres med et diagnoseapparat.
XENON-LYSLÆNGDEREGULERING, INDSTILLING: VIDEO
Justering / diagnose af xenonlygter med automatisk lyslængderegulering
Diagnose med efterfølgende justering af en xenonforlygte med automatisk lyslængderegulering