Radarsensoren in rijhulpsystemen
Lane change assist
Hier vindt u nuttige kennis en waardevolle tips over het onderwerp Lane change assist en Blind spot assist.


Bij de verdere ontwikkeling van rijhulpsystemen om ongevallen te voorkomen, is de interesse in radarsensoren voor rijhulpsystemen voor de achterzijde duidelijk toegenomen. Steeds meer voertuigmodellen worden bij productie reeds met deze sensoren uitgerust. Daarom behoort het thema diagnose en reparatie niet alleen bij merkdealers, maar ook in vrije garages wordt dit vroeg of laat dagelijks werk. In dit document willen wij ons speciaal bezighouden met radarsensoren voor de achterzijde en hun toepassingen in het rijhulpsysteem 'lane change assist'.
Belangrijke veiligheidsinstructie
De volgende technische informatie en praktische tips zijn door HELLA ontwikkeld om autogarages bij hun werkzaamheden professioneel te ondersteunen. De op deze website beschikbare informatie mag alleen worden gebruikt door vakmensen die in de desbetreffende materie zijn opgeleid.
INHOUD
RADARSENSOREN IN RIJHULPSYSTEMEN: WETENSWAARDIGHEDEN
Steeds meer rijhulpsystemen ter ondersteuning van de bestuurder worden uitgerust met radarsensoren. Een voordeel van deze techniek is, dat radarsensoren onafhankelijk van de weersomstandigheden een nauwkeurig meetresultaat kunnen bereiken. Bij het begrip 'radar' denkt men in de eerste plaats aan de lucht- of scheepvaart. Daar zijn deze systemen al jaren bekend en bewezen. 'Radar' is de afkorting van 'Radio Detection and Ranging' en betekent vrij vertaald 'radiodetectie en afstandsmeting'.
Dit wil zeggen dat een radartoestel gebundelde elektromagnetische golven in lichtsnelheid zendt, de zogenaamde primaire signalen. Als deze golven op een object stoten, worden ze als echo's (secundaire signalen) gereflecteerd en door het systeem ontvangen en geanalyseerd. In de analyse-elektronica van het systeem kunnen dan richting, afstand en snelheid worden bepaald.
Toepassing in de automobielsector
Radarsensoren worden gebruikt voor afstandsmeting in bestuurdersassistentiesystemen aan voor- en achterzijde.
Radarsensoren voor toepassingen aan de voorzijde, zoals de ACC (Adaptive Cruise Control), zijn al jarenlang in verschillende motorvoertuigen verkrijgbaar.
Bij de verdere ontwikkeling van rijhulpsystemen om ongevallen te voorkomen, is de interesse in radarsensoren voor rijhulpsystemen voor de achterzijde duidelijk toegenomen. Steeds meer voertuigmodellen worden bij productie reeds met deze sensoren uitgerust. Daarom behoort het thema diagnose en reparatie niet alleen bij merkdealers, maar ook in vrije garages wordt dit vroeg of laat dagelijks werk.

Assistentiesystemen ondersteunen de bestuurder. Hierbij worden verschillende technologieën gebruikt.
Assistentiesystemen ondersteunen de bestuurder. Hierbij worden verschillende technologieën gebruikt.
HELLA 24 GHZ-RADARSENSOREN: GRONDSLAGEN
HELLA produceert al meer dan tien jaar radarsensoren in het bereik van 24 GHz-smalband. Al in 2005 paste HELLA de eerste generatie 24 GHz-radarsensoren seriematig toe. De sensoren zijn geschikt voor de inmiddels geëtableerde standaardfuncties zoals herkenning van de dode hoek, assistentie bij rijkstroken (lane change assist) en hulp bij achteruit inparkeren.
De radarsensor registreert snelheids-, hoek- en afstandsinformatie van objecten in een bereik tot 70 meter achter het voertuig en analyseert deze. Al vanaf de eerste generatie wordt hier de modulatiemethode LFMSK (Linear Frequency Modulation Shift Keying) gebruikt.
Met behulp van deze methode kunnen afstand en relatieve snelheid van meerdere doelen met slechts één signaal (chirp) - waarvan de frequentie zich in de tijd verandert - worden geregistreerd en bepaald.
In de derde radargeneratie wordt een verder ontwikkelde FM-variant gebruikt, waarbij de modulatiebandbreedte is beperkt tot max. 200 MHz. Het systeem werkt met een gemiddeld zendvermogen van 13 dBm (EIRP) in een frequentieband tussen 24,05 en 24,25 GHz. De hieruit resulterende ruimtelijke resolutie van 0,75 m is geschikt voor de gerealiseerde achterzijde-functies. Voor de hoekbepaling wordt hier de monopuls-methode gebruikt. Het systeem voert op basis van specifieke signaalverwerkingsmethoden een fasevergelijking uit van de radarreflexies via de verschillende ontvangstvertakkingen.
In de vierde generatie radarsensoren is een extra veiligheidsfunctie geïntegreerd: de uitstapassistent. Daarmee kunnen gevaarlijke situaties zoals voorbij rijdende voertuigen vroegtijdig, vóór het uitstappen worden herkend en de inzittenden worden gewaarschuwd.

| TECHNISCHE GEGEVENS | |
|---|---|
| Meetprincipe | LFMSK (Linear Frequency Modulation Shift Keying-methode) |
| Frequentiebereik | 24,15 GHz/ISM |
| Bandbreedte | <= 200 MHz/ISM |
| Zendvermogen | <= +20 dBm max. vermogen, EIRP |
| Cyclustijd | 1,5 m bij 200 MHz OBW |
| Snelheidsmeting Relatieve snelheidsinterval |
-70 m/s tot +70 m/s |
| Registratiebereik – Azimuth | 165° |
Afhankelijk van de sensorgeneratie kunnen de volgende toepassingen worden geïntegreerd:



LANE CHANGE ASSIST: OPBOUW EN FUNCTIE
Een technische innovatie van de rijhulpsystemen is de lane change assist. Deze informeert de bestuurder over mogelijke gevaren bij het wisselen van rijstrook op (snel)wegen met meerdere rijstroken om ongevallen te voorkomen en zo bij te dragen aan de verkeersveiligheid.
In dit hoofdstuk wordt de systeeminformatie aan de hand van het voorbeeld van het bestuurdersassistentiesysteem 'Audi Side Assist' weergegeven.

1

Regeleenheden

De lane change assist bestaat uit een master- en een slave-regeleenheid die wat opbouw betreft identiek zijn. Samen met een geïntegreerde radarsensor vormen beide regeleenheden elk een zelfstandige component. Boven de radarsensor is de regeleenheid voorzien van een kunststof deksel. Deze deksel, ook 'Radom' genoemd, bestaat uit een speciaal materiaal waar de radarstralen optimaal doorheen stralen.
De regeleenheid 'master' (1) is achter de bumper aan de linkerzijde gemonteerd en het regelapparaat 'slave' (2) achter de bumper aan de rechterzijde.
.
2
Waarschuwingslampen

Daarnaast beschikt het systeem over twee 4-LED-waarschuwingslampen in de behuizing van de buitenspiegels links en rechts zijn geïntegreerd.
3
In- en uitschakelaar

Een knop waarmee de lane change assist kan worden in- of uitgeschakeld, is boven de deurbekleding linksvoor in de afdekking geïntegreerd.
Door een geïntegreerde LED-lamp in de knop wordt de functiestatus weergegeven. Het systeem slaat de als laatste ingestelde status op en neemt deze bij een herstart over.
Werking van de lane change assist
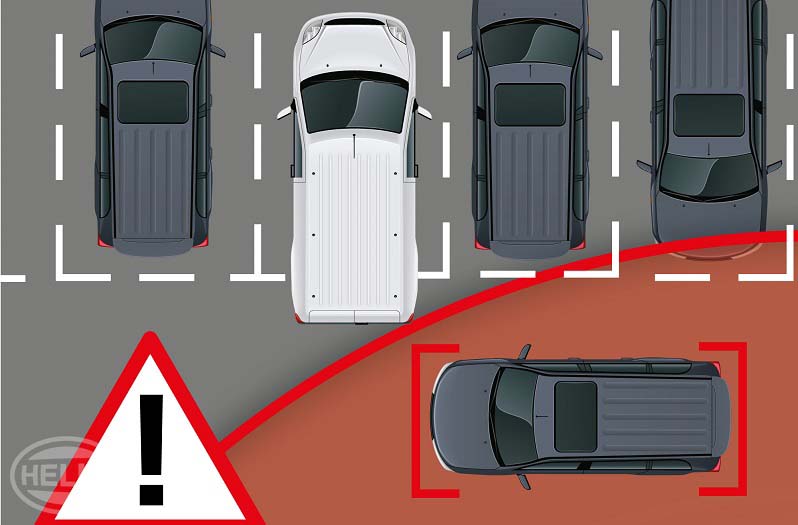
De 'Side Assist' werkt vanaf een snelheid van 30 km/h. Het registratiebereik van de radarsensoren bedraagt ca. 50 meter achter (A) en ca. 3,60 meter naast het voertuig (B).
Het systeem bewaakt het verkeer achter en naast het voertuig met behulp van radarsensoren. Het bewaakte bereik bevat de voor de bestuurder niet zichtbare ´dode hoek´ aan zowel bestuurders- als bijrijderszijde.
Als zich een motorvoertuig in het bewaakte bereik bevindt en er wordt niet van rijstrook gewisseld, wordt de bestuurdersinformatie door het zwak oplichten van de LED-indicaties in de buitenspiegels rechts of links weergegeven. De lichtsterkte is lager, zodat de bestuurder niet onnodig wordt afgeleid. Als de bestuurder in deze situatie het knipperlicht voor een rijstrookwissel bediend, wordt de bestuurder door intensief knipperen van de waarschuwingslamp aan de overeenkomstige zijde rechts of links in de buitenspiegel gewaarschuwd.
Als er een motorvoertuig door het systeem wordt geregistreerd, berekent de desbetreffende regeleenheid tegelijkertijd de tijdsduur tot een mogelijke botsing. Aan de hand van deze analyse onderscheidt het systeem tussen zich naderende, meerijdende en terugvallende motorvoertuigen.

Het registratiebereik van de radarsensoren bedraagt ca. 50 meter achter (A) en ca. 3,60 meter naast het voertuig (B).
Het registratiebereik van de radarsensoren bedraagt ca. 50 meter achter (A) en ca. 3,60 meter naast het voertuig (B).

COMMUNICATIE EN SYSTEEMKOPPELING: OVERZICHT
Voor het berekenen van de bestuurdersinformatie over een mogelijke gevaarlijke situatie, heeft de lane assist talrijke gegevens nodig. De regeleenheid ontvangt de benodigde informatie vanuit verschillende bronnen.
Master- en slave-regeleenheid zijn via een eigen high-speed-CAN-databus met elkaar verbonden. De gegevensuitwisseling vindt plaats met een overdrachtssnelheid van 500 kBit/s. Voor verdere communicatie in het voertuig is de master-regeleenheid verbonden met de diagnose-interface om gegevens uit te kunnen wisselen met andere databus-deelnemers.

Communicatie en systeemkoppeling van de lane change assist
Communicatie en systeemkoppeling van de lane change assist
| Eenheid | Informatie |
|---|---|
| Regeleenheid schakelbord | Bestuurdersinformatie optisch en akoestisch over optredende storingen |
| Regen-lichtsensor | Informeert de master-regeleenheid over de actueel gemeten lichtsterkte van de omgeving voor aanpassing van de waarschuwingslampen |
| ABS-regeleenheid | Informatie over wielsnelheid en giersnelheid |
| Regeleenheid detectie aanhangwagen | Informatie gebruik van aanhangwagen |
| Knop rijstrookassistent | Informatie lane change assist `Aan of uit´ |
| Centrale regeleenheid comfort |
|
| Regeleenheid startautorisatie | Informatie toegang-startautorisatie en sleutelinformatie |
| Regeleenheid weergave- en bedieningseenheid | Bestuurderswens ´Lichtsterkte waarschuwingslampen´ |
Bestuurdersinformatie in het combi-instrument
Bij een systeemuitschakeling worden op het display van het combi-instrument de volgende aanwijzingen weergegeven:
| Aanwijzingen in het display | Oorzaak |
|---|---|
| Audi Side Assist niet beschikbaar: sensoren geblokkeerd | Het werkbereik of het zicht van de sensoren wordt geblokkeerd door bijvoorbeeld een fietsdrager. |
| Audi Side Assist: systeemstoring | Door een defecte sensor kan het systeem geen veilige werking meer garanderen en schakelt uit. |
| Audi Side Assist: momenteel niet beschikbaar | Tijdelijke uitschakeling vanwege een defecte accu of te lage laadstatus. Audi Side Assist: |
| bij gebruik met aanhangwagen niet beschikbaar | Gebruik met aanhangwagen is herkend. |
Functiebeperkingen
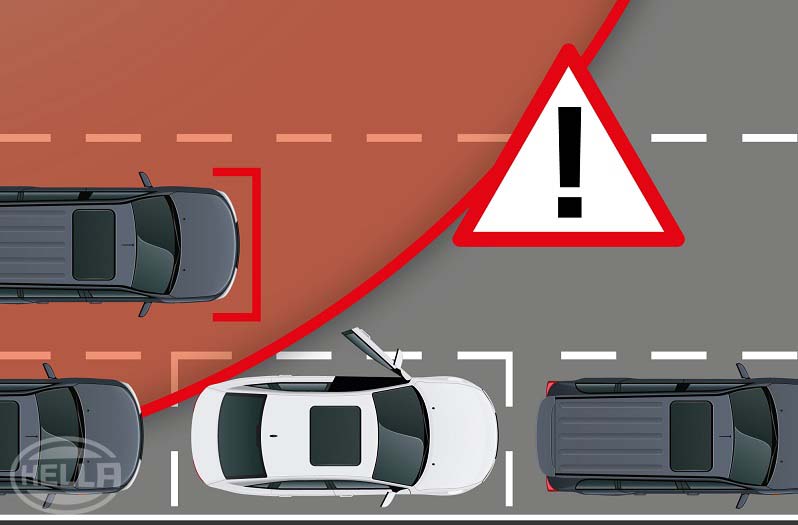
Het radarsysteem is zodanig geconstrueerd, dat alle rijsituaties op normaal brede rijstroken met een linker en rechter rijstrook zijn gedekt. Toch kan het systeem in enkele gevallen de waarschuwingslamp in de spiegel inschakelen, hoewel zich geen voertuig in het kritieke bereik voor een rijstrookwissel bevindt.
Voorbeeldsituaties volgens voertuigfabrikant:
- Als de bestuurder op smalle straten zeer dichtbij de rand rijdt en voertuigen op een andere rijstrook worden gedekt
- Bij scherpe bochten kan het systeem eventueel. reageren op een voertuig op een verder verwijderde rijstrook
- Reactie op te hoge of verspringende vangrails of andere objecten
- Functiebeperkingen door zeer slechte weersomstandigheden
OPMERKING
Voor een probleemloze werking van de lane change assist mag de bumper in het bereik van de radarsensoren niet worden afgedekt of afgeplakt. Bovendien moeten deze gebieden in de winter vrij worden gehouden van sneeuw en ijs.
DIAGNOSE- EN REPARATIE-INSTRUCTIES LANE CHANGE ASSIST: VIDEO
Servicewerkzaamheden aan de radarsensor - Audi Side Assist
In deze video bieden wij u diagnose- en reparatie-instructies voor het rijhulpsysteem 'lane change assist'.
03:41 min
SERVICEWERKZAAMHEDEN AAN DE LANE CHANGE ASSIST: DIAGNOSE
Diagnose
De systeemfuncties van de lane change assist worden constant bewaakt. Optredende fouten worden in het foutgeheugen van de regeleenheid geregistreerd en kunnen met een geschikt diagnoseapparaat worden uitgelezen. Naargelang het systeem kunnen nog andere parameters worden weergegeven en worden geraadpleegd om fouten op te sporen.
Bij het opsporen van fouten kunnen de volgende diagnosefuncties helpen:
1

Foutcode

Met deze functie kunnen de in het foutgeheugen opgeslagen foutcodes worden uitgelezen en gewist. Daarnaast kan er informatie over de foutcode worden opgeroepen.
2
Parameters uitlezen
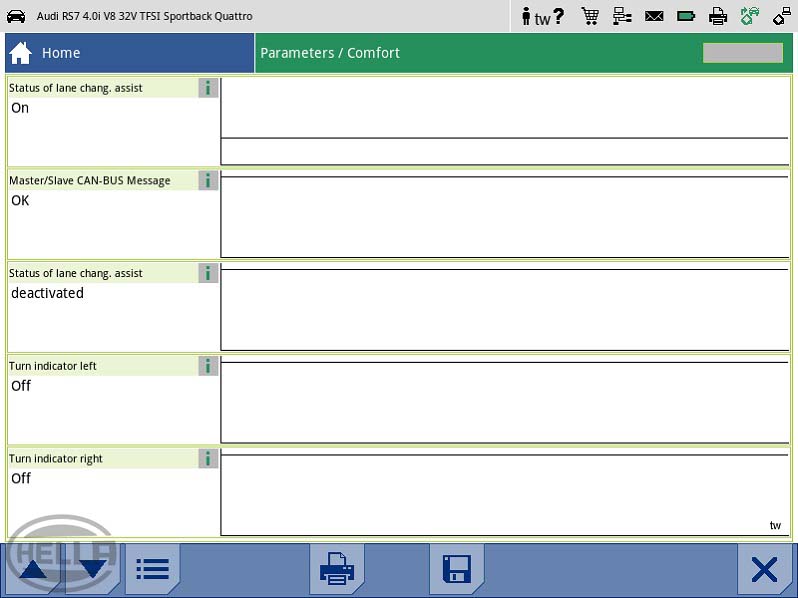
Met deze functie kunnen de actuele meetwaarden van de regeleenheid worden weergegeven.
3
Actuatortest uitvoeren
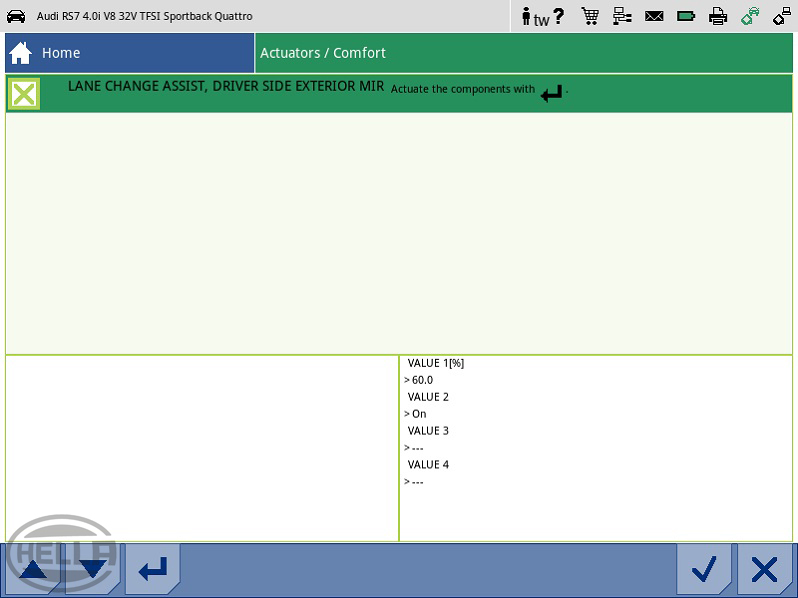
- Regeling van componenten door de regeleenheid in elektronische systemen
- Controle van de basisfunctie en kabelverbinding van de componenten
4
Codering
- Met deze functie kunnen nieuwe componenten of extra functies in een systeem worden vrijgeschakeld of gecodeerd.
- Codering van stelaandrijvingen of regeleenheden na vernieuwing aan het voertuig.
5
Identificatie van de regeleenheden

Hier kan speciale systeem- en regeleenheidinformatie worden opgeroepen.
OPMERKING
De verschillende diagnosemogelijkheden worden weergegeven aan de hand van het voorbeeld van het diagnoseapparaat mega macs 66. De testintensiteit en veelvoud aan functies zijn afhankelijk van de systeemconfiguratie van de regeleenheid.
Kalibratie
Om een veilige werking van de lane change assist te garanderen, moet deze na de volgende werkzaamheden worden aangepast:
- Als een of beide regeleenheden zijn vervangen
- Als er reparatiewerkzaamheden aan de carosserie aan de achterzijde zijn uitgevoerd
- Als er een verandering van de positie van de achterbumper is uitgevoerd
- Bij verandering van de montagepositie van de regeleenheden door montage en demontage
Om het systeem te kalibreren, zijn behalve een diagnoseapparaat ook een Doppler-generator en een kalibratieplaat nodig. De testinstrumenten worden volgens de voorschriften van de fabrikant achter het voertuig uitgelijnd. De Doppler-generator simuleert een zich bewegend object. Het kalibratieproces wordt door het diagnoseapparaat gestart en volgens de vastgelegde werkstappen uitgevoerd. Binnen dit volautomatische proces herkent de regeleenheid de vereiste correctiewaarden uit de werkelijke en gewenste positie en slaat deze voor toekomstige afstandsmetingen op.

Hoe nuttig is dit artikel voor jou?
Helemaal niet nuttig
Zeer nuttig