Correction de portée lumineuse manuelle
Correction de portée lumineuse
Vous trouverez ici des astuces et conseils utiles sur le thème de la correction de portée lumineuse des véhicules.


L'état de chargement et les mouvement de tangage du véhicule modifient la portée lumineuse des projecteurs, ce qui risque d'éblouir les autres usagers de la circulation. Les systèmes de correction de portée lumineuse sont donc prescrits par la loi. Découvrez sur cette page comment fonctionnent les systèmes courants sur le marché et comment les vérifier avec des moyens simples. Vous apprendrez également ce qu'il faut faire en cas de défaillance et lors du réglage des projecteurs avec correction de portée lumineuse automatique.
Consigne de sécurité importante
Les informations techniques, les conseils et astuces pratiques compilés ci-après ont été rédigés par HELLA afin de fournir une aide professionnelle aux ateliers de réparation automobile dans le cadre de leurs activités. Toutes les informations mises à disposition sur ce site sont destinées à être exploitées uniquement par des professionnels dûment qualifiés.
SOMMAIRE
CORRECTION DE PORTÉE LUMINEUSE MANUELLE: FONCTIONNEMENT
La correction de portée lumineuse sert à adapter la hauteur de la coupure clair/obscure à l'état de chargement du véhicule. Il s'agit d'éviter d'éblouir les conducteurs du trafic en sens inverse lorsque le véhicule est chargé. Dans les modèles de véhicules actuels, on trouve des systèmes manuels et automatiques de correction de portée lumineuse. Dans le cas des installations manuelles, le conducteur doit lui-même régler l'inclinaison des projecteur à l'aide d'un interrupteur. Il existe des systèmes pneumatiques tout comme des systèmes électriques.
Le problème se posant ici est que de nombreux véhicules chargés éblouissent les autres usagers de la route, étant donné que les automobilistes ne sont pas suffisamment informés des possibilités de réglage et du fonctionnement de ce réglage dans leur véhicule.

CORRECTION DE PORTÉE LUMINEUSE AUTOMATIQUE: FONCTIONNEMENT
Structure de la correction de portée lumineuse automatique
Ces systèmes de correction de portée lumineuse remplissent leur fonction sans que le conducteur ait à agir. On distingue deux systèmes : la correction de portée lumineuse quasi statique et la correction dynamique

1 Projecteur, 2 Actionneur, 3 Capteur de train avant, 4 Commutateur d'éclairage, 5 Calculateur, 6 Capteur de train arrière, 7 Capteur de vitesse de rotation, 8 Chargement
Correction de portée lumineuse quasi statique
Dans le cas des systèmes automatique de correction de portée lumineuse, on distingue les systèmes quasi-statiques des systèmes dynamiques de correction de portée lumineuse. La correction de portée lumineuse quasi statique corrige uniquement les modifications de l'inclinaison dues à des modifications de la charge.
Un calculateur analyse les données des capteurs de train AV et AR, les compare aux données théoriques enregistrées et, le cas échéant, active en conséquence les servomoteurs sur les projecteurs.
En règle générale, les mêmes servomoteurs que ceux utilisés avec la correction manuelle sont montés. Sur les véhicules compacts où le « dépassement latéral » des roues n'est pas excessif, ce dispositif offre la possibilité de renoncer au capteur de train AV étant donné que les changements d'inclinaison ne se produisent en majeure partie que sur le train AR. La correction de portée lumineuse quasi statique fonctionne en outre avec un grand amortissement : elle ne régule que les inclinaisons de caisse de longue durée. Dans les kits de post-équipement « xénon » de HELLA, un système à base d'ultrasons est utilisé. Le capteur mesure alors l'écart direct par rapport à la chaussée.
Correction de portée lumineuse dynamique
Dans le cas de véhicules équipés de projecteurs xénon, on trouve aujourd'hui pratiquement que des systèmes de correction de portée lumineuse dynamiques qui réagissent également aux modifications de l'inclinaison dues à la conduite, p. ex. l'accélération ou le freinage.
Le schéma fonctionnel montre la structure d’un système de correction dynamique. Le calculateur traite les données théoriques à partir des données de capteurs, en tenant compte des conditions de roulage. Contrairement à la correction de portée lumineuse quasi statique, les servomoteurs sont ensuite activés en fractions de seconde. Pour obtenir ces temps de réaction rapides, on utilise principalement des moteurs pas-à-pas comme actionneurs des projecteurs.
Correcteur de portée lumineuse pour correction manuelle et automatique
Dans les systèmes que l'on trouve actuellement sur le marché, ce sont les correcteurs de portée lumineuse électriques qui se sont imposés, et dont il existe aujourd'hui la 3ème génération, dotée de nouvelles optimisations (version 3i).
HELLA propose des solutions de systèmes personnalisés optimales. Des correcteurs de portée lumineuse à intégrer dans les projecteurs ainsi que des correcteurs destinés à un montage extérieur avec et sans réglage de base manuel, en version 12 V ou 24 V, sont disponibles. Une fabrication entièrement automatisée s'appuyant sur des standards de qualité élevés garantit un volume de production de plus de 10 millions de correcteurs par an. Grâce au développement conséquent des site internationaux, il est également possible de livrer des correcteurs à des clients en Corée, Inde et Chine.

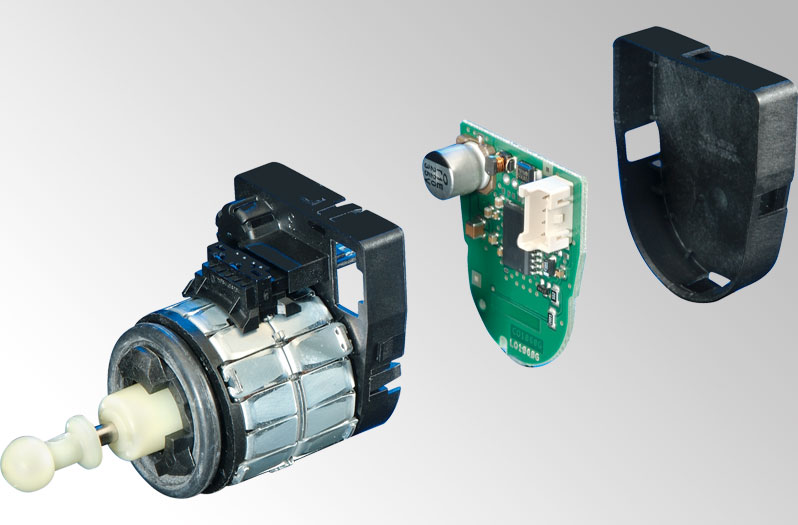
Le moteur pas-à-pas intelligent (ISM - Intelligent Stepper Motor)
Le moteur pas-à-pas intelligent associe, dans une unité mécatronique, le moteur pas-à-pas bipolaire à l'électronique de puissance logée habituellement dans un calculateur séparé. Le composant central de l'ISM est un circuit intégré qui réalise la commande complète du moteur pas-à-pas, le diagnostic et l'interface avec le système supérieur via un module de communication à interface bus LIN.
Les principaux avantages fonctionnels du moteur pas-à-pas intelligent sont :
- commande de micro-pas (fonctionnement peu bruyant et générant peu de résonances)
- capacité de diagnostic
- comportement CEM amélioré
- traitement des défauts partiellement autonome
- concept de câblage optimisé
HELLA s'appuie sur la technologie ISM surtout pour les systèmes de projecteurs variables. En plus du moteur pas-à-pas intelligent pour la correction de portée lumineuse, l'éclairage de virage dynamique et le cylindre du module VARIOX® sont également équipés de moteurs pas-à-pas intelligents.
Le calculateur de correction de portée lumineuse automatique et dynamique
Depuis 1995, l'on utilise des calculateur HELLA pour la correction de portée lumineuse automatique et dynamique dans les véhicules avec éclairage xénon.
La nouvelle génération des calculateurs de correction de portée lumineuse se caractérise par une sortie bus LIN supplémentaire et se révèle donc être un composant standard universel. Les données de compression des capteurs de train sont traitées dans le calculateur et, à l'aide d'algorithmes ingénieux, sont converties en grandeurs de commande pour le réglage de la portée lumineuse. La structure modulaire des calculateurs permet de combiner les différents composants - comme par exemple le boîtier, le connecteur, le circuit imprimé ou le logiciel - de façon à pouvoir réaliser, au regard des différentes exigences des clients, un maximum de synergie de coûts et de flexibilité. Grâce à l'interface bus CAN, le calculateur peut, en fin de ligne de production du véhicule, être adapté aux différents types de véhicules par codage ou programmation des paramètres spécifiques.

Le capteur de niveau de véhicule inductif
Pour toute une série d'équipements favorisant la sécurité et le confort, comme la suspension active, les régulations de niveau ainsi que la correction de portée lumineuse, il est nécessaire d'enregistrer l'inclinaison du véhicule.
Sur le capteur de niveau inductif, plusieurs bobines conductrices qui génèrent un champ électromagnétique sont logées sur une carte de circuit imprimé. Cette carte de circuit imprimé permet de déplacer un rotor métallique relié au levier d'actionnement du capteur et qui influence le champ électromagnétique. Les autres bobines qui se trouvent sur la carte de circuit imprimé du capteur détectent un changement du champ en fonction de la position du levier du capteur et l'analysent à l’aide d’un ASIC spécialement développé pour cette fonction.
Ce capteur permet de réaliser différentes plages angulaires avec une linéarité élevée constante. Le capteur de train inductif fournit à la fois un signal analogique et un signal PWM (MLI). Le capteur garantit une précision optimale quelles que soient les conditions de température. La position zéro du capteur peut être modifiée de façon spécifique. Le nouveau capteur inductif est un développement ultérieur de ce capteur. Il fournit un signal PWM (MLI) récurrent comprimé à 75 % sur la circonférence. Ce capteur peut donc être utilisé sur de multiples plate-formes en tant que pièce identique. Différentes positions et tolérances de montage sont alors comparées par un ajustage électronique dans le calculateur chargé de l'analyse.
Prochains objectifs de développement : une nouvelle optimisation de l'encombrement et l'amélioration du signal de sortie pour les applications de châssis (capteur de niveau de véhicule 2ème génération).
Le calculateur de portée lumineuse intégré au capteur
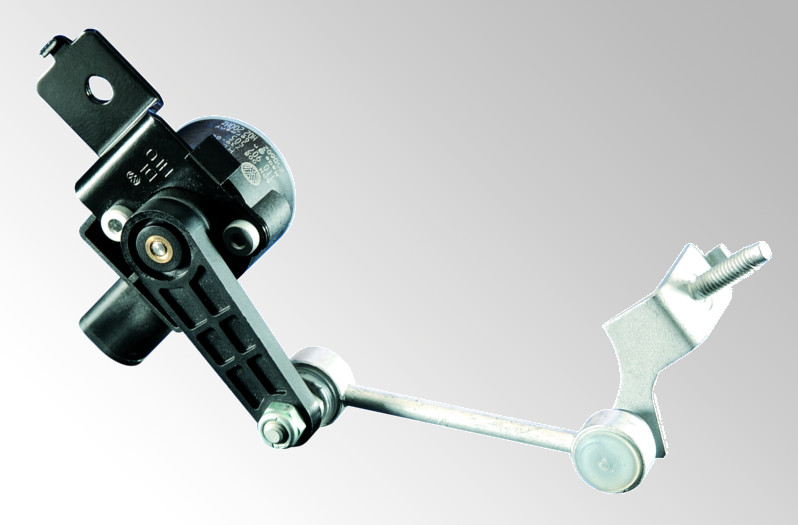
Pour mettre en œuvre la correction de la portée lumineuse dans les véhicules compacts, on a intégré, dans le cadre d'une autre étape de développement, le calculateur séparé dans le capteur de train pour obtenir le SIECU (Sensor Integrated Electronic Control Unit).
La base du calculateur de portée lumineuse intégré au capteur est le capteur de niveau de véhicule inductif. Les interfaces mécaniques, comme la fixation et le levier de capteur, correspondent à celles des capteurs de train.
En tant que calculateur intégré au capteur sur le train arrière, cette solution de correction de la portée lumineuse automatique se prête, grâce à ces avantages, non seulement au montage dans les véhicules équipés de projecteurs xénon, mais apporte également un gain considérable en matière de confort et de sécurité dans les véhicules à projecteurs halogènes en remplaçant la correction de portée lumineuse manuelle.

CONSEILS DE MANIPULATION DES SYSTÈMES DE CORRECTION DE PORTÉE LUMINEUSE: CONSEILS PRATIQUES
En cas de défaut électrique dans le système pendant un trajet, les projecteurs restent dans la position en cours. Sur d'autres véhicules, en revanche, les projecteurs retournent dans leur position initiale et y restent. Mais dans tous les cas, l'automobiliste est averti du défaut par un témoin lumineux ou par un message d'avertissement dans le poste de conduite.
CORRECTION DE PORTÉE LUMINEUSE DÉFECTUEUSE: CAUSE DE DÉFAILLANCE
CONTRÔLE DE LA CORRECTION DE PORTÉE LUMINEUSE: DÉPANNAGE
En combinaison avec une correction de portée lumineuse automatique, un appareil de diagnostic est en règle général requis pour le réglage des projecteurs. Cet outil permet également d'effectuer le diagnostic du système.
Et même sans cet outil, il est possible de contrôler le système de correction de portée lumineuse à l'aide d'un multimètre et d'un oscilloscope. Il est toutefois important de toujours avoir un schéma électrique du système à contrôler.

Contrôle du fonctionnement
- Placer le véhicule non chargé sur une surface plane.
- Positionner l'appareil de réglage des projecteurs devant le véhicule et allumer les feux de croisement. Vérifier que la coupure clair/obscure est correcte.
- Charger l'arrière du véhicule, par exemple en remplissant le coffre. Dans le cas d'une correction de portée lumineuse quasi statique, la régulation des projecteurs s'effectue après quelques secondes et peut être surveillée avec l'appareil de réglage des projecteurs. Dans le cas d'une correction de portée lumineuse dynamique, la régulation s'effectue en un temps très court si bien que sur certains véhicules, l'opération de régulation ne peut être perçue que sous la forme d'un petit « scintillement » sur l'écran de l'appareil de réglage des projecteurs. Sur certains véhicules, cette régulation ne fonctionne toutefois que lorsque le véhicule roule.
Si aucune régulation n’est perceptible, les mesures suivantes doivent être réalisées :
- Contrôler la tension d'alimentation sur les servomoteurs, le calculateur et le capteur de correction de portée lumineuse.
- Contrôler l’absence d’endommagement mécanique et la bonne position de montage du capteur de correction de portée lumineuse et du câble de transmission de données.
- Contrôler le signal du capteur avec l’oscilloscope.
- Vérifier les paramètres et les valeurs réelles à l'aide de l'appareil de diagnostic.
RÉGLAGE DE LA CORRECTION DE PORTÉE LUMINEUSE XÉNON: VIDÉO
Ajustage/diagnostic des projecteurs xénon avec correction de portée lumineuse automatique
Déroulement d'un diagnostic avec ajustage d'un projecteur xénon avec correction de portée lumineuse automatique.
Cet article vous a-t-il été utile ?
Pas du tout utile
Très utile